
Here at StreetDrone, given we are a safety-led autonomous urban trial company with a focus on challenging ‘zone 1’ restrictive metropolitan environments, we have built a proprietary three step preparation programme to ensure trials are both safe as well as forensically focused on delivering specific client outcomes.
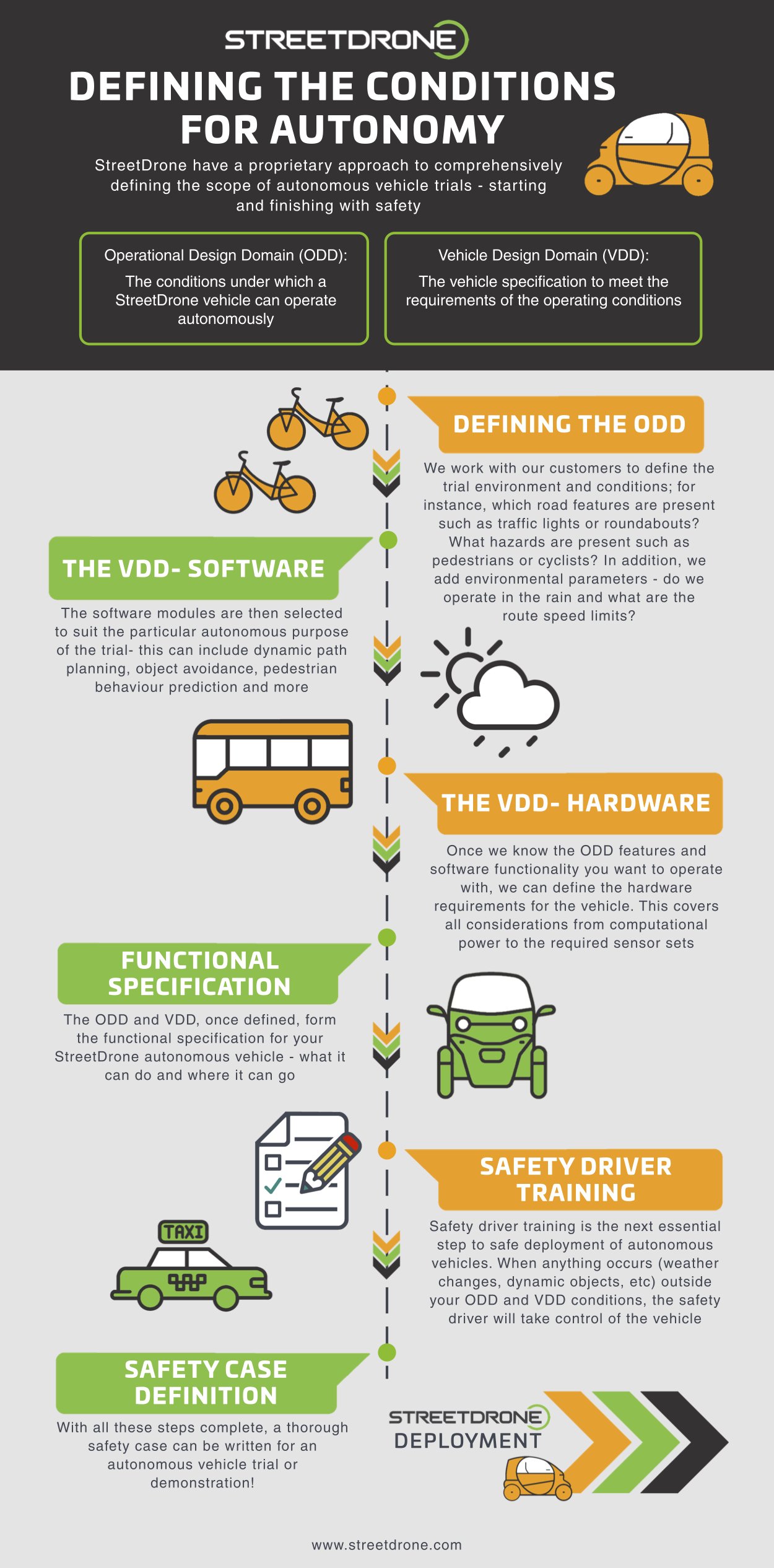
Step one of our approach is defining the Operational Design Domain (ODD), the conditions under which a StreetDrone vehicle can operate autonomously.
Many factors contribute to building a comprehensive ODD, for StreetDrone these include geographic location, site accessibility, speed restrictions, weather and local environmental features to name but a few. Our sphere of competence in ‘zone 1’ environments presents a very broad array of different features and considerations that typically need to be factored into our ODDs.
Ensuring that the ODD is fully defined is an important part when deploying autonomous systems safely as these definitions are the cornerstone of returning control of the vehicle to the Safety Driver when operating parameters fall outside of the ODD. Thus the ODD becomes the defining term of reference for safe, autonomous operation.
Once the ODD has been scoped out, our second step is focused on the vehicle. StreetDrone work with customers to define the Vehicle Design Domain (VDD) or the definition of what the autonomous vehicle can do. The software modules are selected to suit the autonomous purpose of the trial and may include functionality that includes anything from dynamic path planning to object avoidance and pedestrian behaviour prediction.
The preparation process is essentially linear and inter-dependent, so once the ODD and VDD are fixed, the third and final step is to specify the hardware requirements for the vehicle that have the capacity to span the environmental operating conditions laid out in the ODD and the features on trial as codified in the VDD with our customers.
The hardware requirements are comprehensive and account for the computational power needed to required sensor sets both to meet the tasks specified but also to provide a high level of redundancy (or in other words, duplication of capacity) to ensure a failsafe deployment.
As safety is the first order priority for us at StreetDrone, it’s imperative that the ODDs and VDDs are comprehensive and fully defined as they form the basis of the safety case, hazard analysis and the verification work for software and hardware to ensure the automated driving system is capable of performing all functionality within the scope of the project.
We take a different approach to many other autonomous trial companies who have an ambition to expand their ODDs to the ultimate goal of driving anywhere, anytime in all conditions. We vary from that ambition, focusing on ODD refinement to achieve a low-speed zone 1 automated transport solution, as this fits with our customer requirements to provide solutions for congested and polluted city centre contexts where autonomy will provide solutions to society’s most pressing mobility issues.
To find out more, get in touch with StreetDrone at info@streetdrone.com



