We draw on StreetDrone’s unique motorsport, automotive and CAV application experience, having worked with global customers and with partners in multi-million, government-funded projects to apply real products in the real world.
A number of core technologies, some of which are IP of StreetDrone, joined together as an ecosystem, form a number of autonomous-ready vehicle platform packages that we currently offer.
Available to order today* with advanced drive-by-wire, custom bodywork, cameras and more.
Our vehicles are fully integrated autonomous platforms for testing and R&D. They are already in service around the world and feature heavily among the UK’s autonomous vehicle test-beds.
Please get in touch with us, and speak to a friendly expert about the requirements for your autonomous vehicle programme today.
Our drive-by-wire system ensures a safety driver can always take over by any number of means, including buttons, switches and intuitive intervention via brake throttle and steering.
Our system features redundant monitoring of all drive-by-wire sensors.
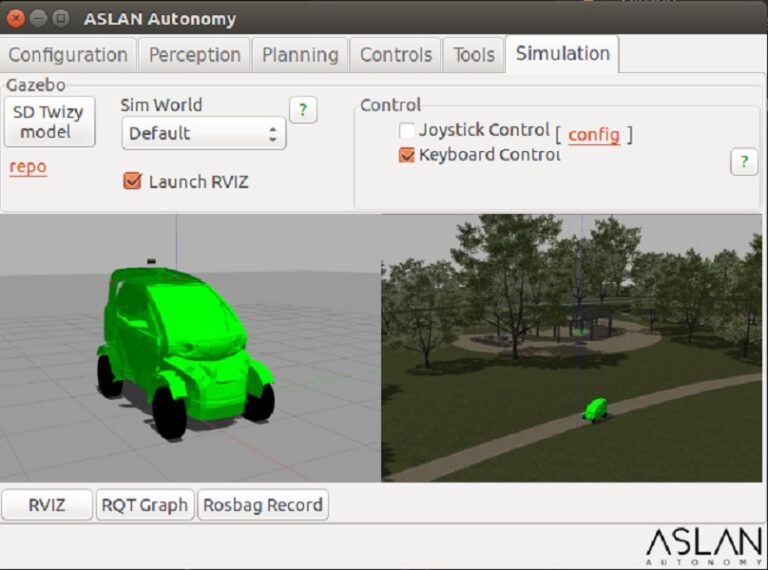
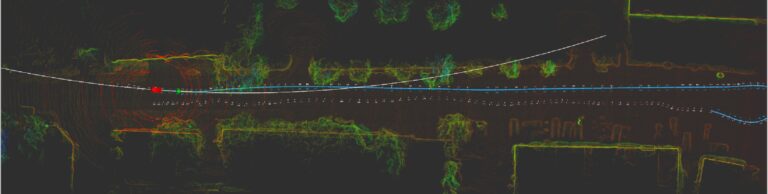
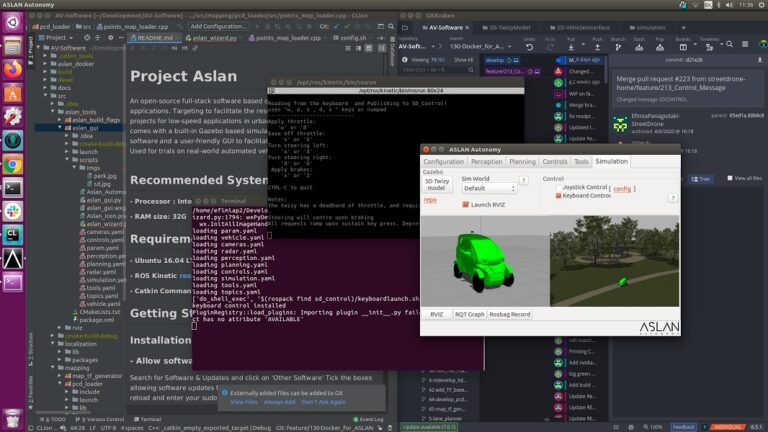
Our vehicles have interfaces to multiple self-driving stacks, including supported ROS interfaces for Project Aslan and Autoware.
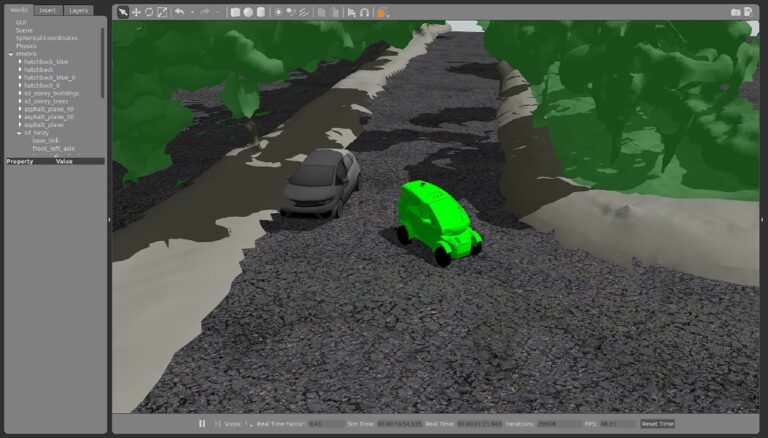
AI for rapid autonomous deployments. We can also provide our vehicle models for open-source simulators such as Gazebo.
SENSOR SET
Specify Your Vehicle
Our vehicles are fitted with our “universal roof-rack” system to ensure easy mounting of sensors.
Choose to complement your development vehicle with a range of sensors including LiDAR, RADAR and Ultrasonics.
Vehicles are also fitted with a powered computation bay, easy CAN connection, and future-proofed power electronics, all partitioned from our loading bay.
Run and build apps on our data platform, by connecting your vehicle to the cloud via any network
TELEOPERATION_
Teleoperation
Build your remotely driven fleet with our teleoperation stations, providing integrated hardware and software for functionally safe operation
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept All”, you consent to the use of cookies. However, you may visit "Cookie Settings" to provide a controlled consent.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.